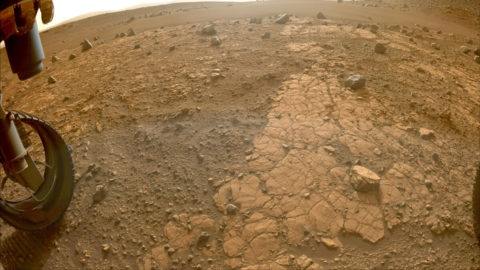
The Perseverance rover spent the first two Earth years of its mission on Mars driving and sampling within Jezero crater. As anticipated, Jezero was found to be rich with interesting geological features, and the rover used 21 of its precious 43 sample tubes in the region. The rover wrapped up this science campaign by dropping 10 of these samples in a backup depot area for retrieval by a future mission. With this important work out of the way, the rover’s science team eagerly turned its attention to the prospect of new and exciting discoveries in the unexplored area on the Delta Top. To reach these areas as quickly as possible, the scientists planned an aggressive driving campaign up the river delta. The first stop in this race up the delta would be the Tenby region – home to some of the most geologically interesting outcrops of the delta.
This fresh terrain represented a golden opportunity for Ingenuity to prove its worth to the rover’s science mission. Providing the rover team with recon images just a few days before the rover reaches a site gives scientists significantly more time to determine their exploration priorities, and gives rover planners advanced notice of any unexpected terrain. With the fading of Martian winter, Ingenuity now had enough power to fly hundreds of meters ahead of the rover with each flight and deliver on the promise of being a real science scout.
There were just a few complications. First, unlike the relatively flat and unobstructed crater floor, the canyon-like river delta presented some serious communication challenges between the rover and the helicopter, meaning that the helicopter could never hope to get more than a few hundred meters ahead of the rover. This effectively nullified any speed advantage Ingenuity had over the rover. Second, unlike the Jezero crater floor, the rover would not be loitering in any spot for more than a few sols, meaning that if the helicopter ever fell behind, there would be precious little time to catch up before falling out of communications range. Third, the helicopter is required to maintain a wide keepout zone around the rover during flight. Normally this isn’t a problem, but in the narrow channels of the river delta, it effectively means that Ingenuity doesn’t have enough space to pass the rover if it ever falls behind. The end result of these constraints was to put the helicopter in the precarious mode of making short but frequent flights timed to stay just ahead of the rover as it drove.
The race up the delta began cautiously at first, with a scouting flight over rocky top on Sol 689 (Flight 41). This was needed because one of the most critical things that Ingenuity (and to a lesser extent Perseverance) needs for planning is a good understanding of the terrain. This understanding comes primarily from expert planetary geologists who correlate HiRISE satellite imagery with the terrain observed on the ground. There was some concern that the terrain in the river delta was so unlike that seen in the flat crater floor, that it might invalidate these correlation models. After imagery from Flight 41 showed that we could still trust our terrain understanding to find landing sites, we had everything we needed to start flying.
The race began in earnest on Sol 697 (Flight 42), with the helicopter flying past Rocky Top and landing near Jenkins Gap. Out of the gate, it became apparent just how hard this process was going to be. Even the modest distance covered by Flight 42 had taken us out of communications range. Attempts to bring back useful science images from the flight resulted in nothing but a few garbled packets (just enough show us the helicopter was still alive). It took another four sols before the rover was close enough to restore communications and get any useful data back to the rover. By that time, the rover was practically on top of the helicopter and another urgent flight was needed. Unfortunately, the flight data also showed a curious and potentially dangerous issue with the landing hazard mitigation system (used successfully since Flight 39). The team worked around the clock to understand the issue, giving the all-clear with just enough time to fly before being overtaken on Sol 708.
This game of cat and mouse repeated itself several more times over the next few flights, with the helicopter operations team eventually setting a new record for flight frequency. While the helicopter team typically hopes to fly as often as once a week, we ultimately completed four flights (42-46) in the space of just nine days. As promised, the team has also started pushing the flight envelope of our resilient rotorcraft. Starting with Flight 43, we changed the standard flight altitude from 10 meters to 12 meters in preparation for higher flight speeds. We then proceeded to set a new flight speed record of 6 meters per second during Flight 45, with plans to increase it further over upcoming flights. These accomplishments are a real testament to the dedication of our hard-working guidance, navigation, and control (GNC) team.
Taken together, these incredible efforts allowed the helicopter to stay ahead of the rover all the way up the delta, arriving at Abercastell (within sight of Tenby) while holding a respectable two-sol lead on Perseverance. A number of issues (communications failures, anomalies with the rover, and a recurrence of a known helicopter camera issue) have since conspired to prevent us from getting advanced reconnaissance of Tenby, but we’re looking forward to scouting other nearby science targets while the rover is occupied over the next few sols. This was just the opening chapter of what has the potential to be an epic kilometers-long race on the red planet.
Written by Travis Brown, Chief Engineer Ingenuity Mars Helicopter at NASA’s Jet Propulsion Laboratory





{kind=link}